DARPA працює над створенням роботів-шпигунів за підводними човнами |
| Monday, 07 January 2013 |
|
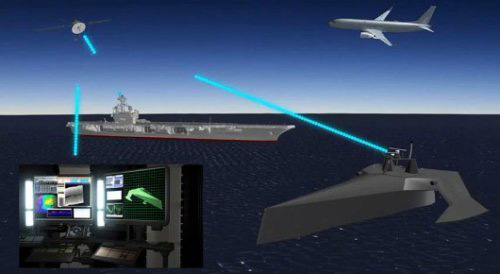
Слід зауважити, що на відміну від багатьох типів безпілотних апаратів, що знаходяться на службі у військових, робот ACTUV не несе на собі ніякої зброї. Його основним завданням є виявлення, відстеження та супровід ворожих субмарин. А у разі необхідності проведення активних дій у цю справу вступлять зовсім інші судна та літаки. Як вже говорилося вище, судно ACTUV діє весь час абсолютно самостійно, контроль з боку людини вимагається лише при вході і виході судна з завантаженої портової акваторії. Як очікується, судно ACTUV зможе функціонувати у морі протягом 60-90 діб, а цей термін у першу чергу визначається погодними умовами, присутніми у районі проведення операцій. Періодично судну ACTUV знадобиться повернення у порт для проведення дозаправки, ремонту і технічного обслуговування його систем. Навігація в автономному режимі буде реалізована у вигляді комбінації системи штучного інтелекту та системи різноманітних бортових датчиків, серед яких будуть електронно-оптичні датчики, радари далекого і ближнього радіусу дії, лазерний сканер LIDAR (Light Detection And Ranging) і багато інших. Коли судно ACTUV буде наближатися до передбачуваного місцезнаходженням своєї цілі, воно буде використовувати пару високочастотних гідролокаторів з системою активного "підсвічування", що дозволяє поліпшити точність роботи гідролокатора і підвищити дальність його дії. Додаткову інформацію про можливу ціль будуть надавати чутливі датчики-магнітометри. На основі всіх зібраних даних, у тому числі зі спеціального високочастотного акустичного гідролокатора, судно ACTUV буде здатне скласти зображення, визначити тип субмарини-цілі, ідентифікувати екземпляр субмарини та її приналежність.
Усі ці дані будуть оброблені логічною системою на базі штучного інтелекту, який буде здатним навіть визначити найближчі наміри ворожої субмарини за деякими ознаками. Наприклад, однією з поширених тактик ухилення субмарин від виявлення є її приховування під звичайним судном, що йде по поверхні моря. Знаючи про цей факт, судно ACTUV зможе самостійно приділяти більше уваги морським суднам, що рухаються у контрольованому напрямку по контрольованій акваторії. Звичайно, система інтелекту не буде настільки досконала, щоб не заплутатися при виконанні субмариною хитрого відволікаючого маневру, проведеного досвідченим капітаном. Але у цьому випадку керування судном ACTUV може перейти у руки людини-оператора, який виправить всі помилки системи і направить судно далі по вірному шляху. Поява перших дослідних зразків суден-роботів ACTUV, які будуть проходити програму обширних випробувань у морі, відбудеться ще тільки через кілька років. Але, якщо програма DRAPA ACTUV буде виконана успішно, то можливості суден ACTUV можуть стати тим, що змінить правила гри при діях проти субмарин у відкритому морі.
Джерело: InfoNova.org.ua За матеріалами: dailytechinfo.org
Наступні новини у розділі:
Попередні новини у розділі:
|
 Завдяки новому відеоролику, опублікованому компанією Science Applications International Corporation (SAIC), стали відомі деякі подробиці і деталі проекту Управління перспективних дослідницьких програм Пентагону DARPA, спрямованого на створення безпілотних суден-роботів, які повністю в автоматичному режимі зможуть виявляти і стежити за ворожими підводними човнами. Програма по створенню роботів Anti-Submarine Warfare Continuous Trail Unmanned Vehicle (ACTUV) була розпочата DARPA у відповідь на загрозу, зумовлену збільшенням кількості недорогих дизельно-електричних підводних човнів, придбання яких може дозволити собі будь-який більш-менш великий наркокартель чи уряди країн, що розвиваються.
Завдяки новому відеоролику, опублікованому компанією Science Applications International Corporation (SAIC), стали відомі деякі подробиці і деталі проекту Управління перспективних дослідницьких програм Пентагону DARPA, спрямованого на створення безпілотних суден-роботів, які повністю в автоматичному режимі зможуть виявляти і стежити за ворожими підводними човнами. Програма по створенню роботів Anti-Submarine Warfare Continuous Trail Unmanned Vehicle (ACTUV) була розпочата DARPA у відповідь на загрозу, зумовлену збільшенням кількості недорогих дизельно-електричних підводних човнів, придбання яких може дозволити собі будь-який більш-менш великий наркокартель чи уряди країн, що розвиваються.